Uglaševanje štirikolesnega volana in blaženja v Maranellu
26.05.2023 Štirikolesni volan ali štirikolesno krmiljenje za Ferrari ni nikakršna novost. V iskanju nenehnega napredka pri zagotavljanju izvrstnih voznih lastnosti pa inženirji že iščejo korak naprej.
Štirikolesni volan ali štirikolesno krmiljenje za Ferrari ni nikakršna novost. V iskanju nenehnega napredka pri zagotavljanju izvrstnih voznih lastnosti pa inženirji že iščejo korak naprej.
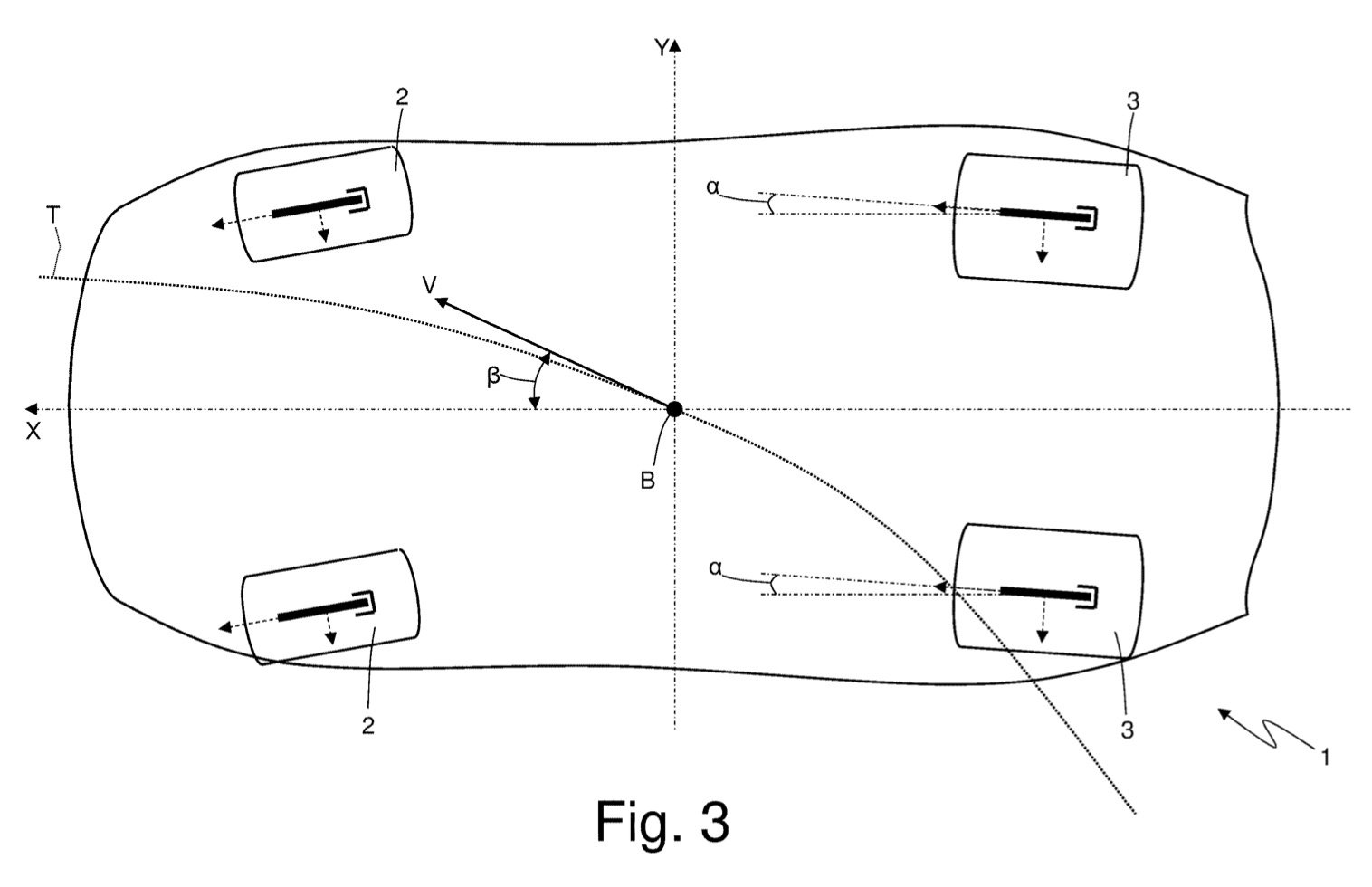
Sodeč po patentnih skicah, je Ferrari odločen, da še bolj temeljito uskladi delovanje vzmetenja ter zavijanja koles, kjer vidi rezerve za izboljšanje vodljivosti. Ferrari je sistem za krmiljenje zadnjih koles poimenoval »sistem virtualne kratke medosne razdalje«, saj je ta ustvaril vozne lastnosti vozil s krajšo medosno razdaljo. Večinoma gre za sisteme, kjer zadnji kolesi pri nižji hitrosti za boljše manevriranje zavrti v nasprotno smer od sprednjih, pri višji hitrosti pa v isto smer. Slednje daje protiutež centrifugalni sili, ki avto potiska na zunanjo stran ovinka, preprečuje zdrs zadnjih koles in obenem pomaga vozniku ohranjati željeno vozno linijo.
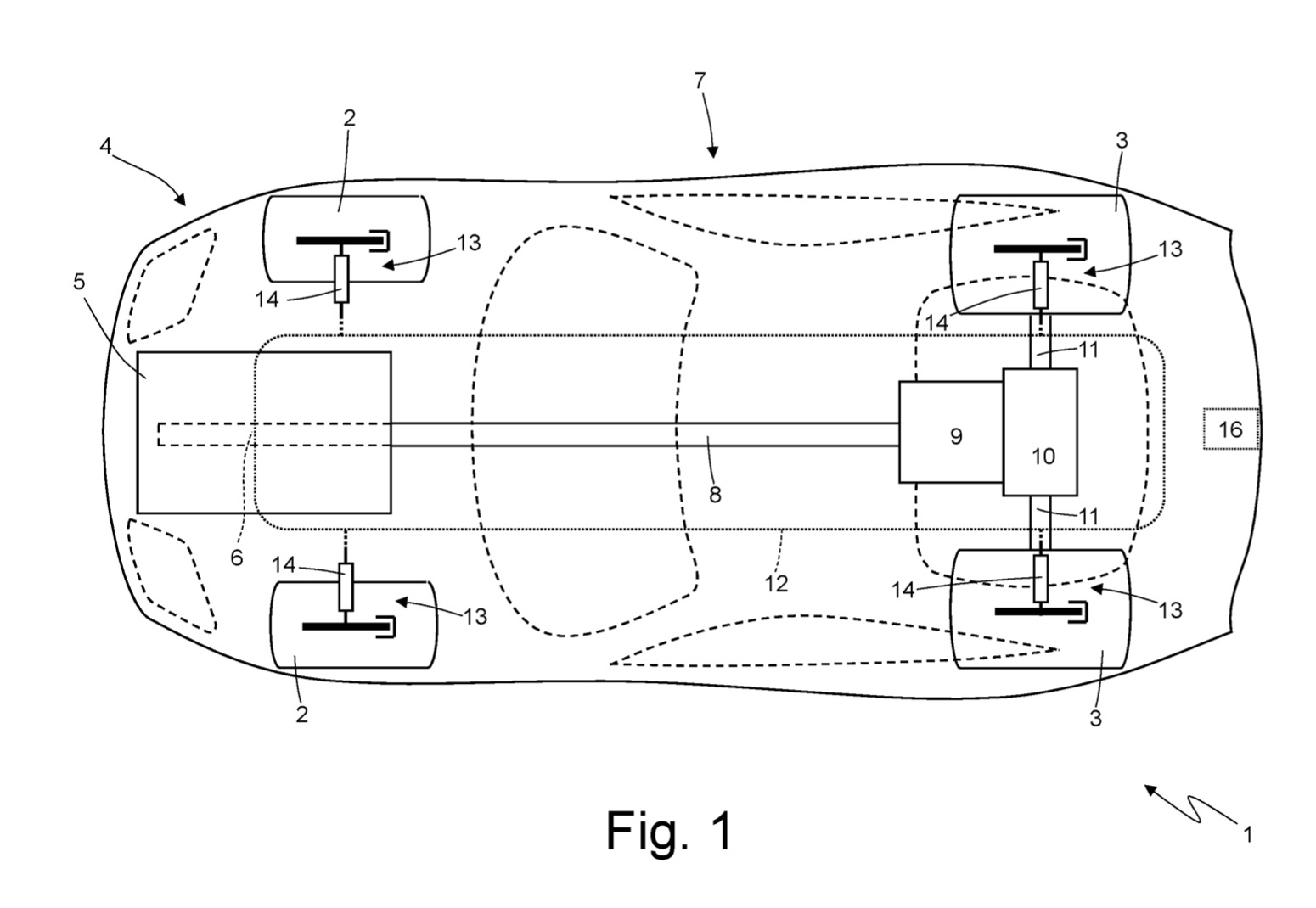
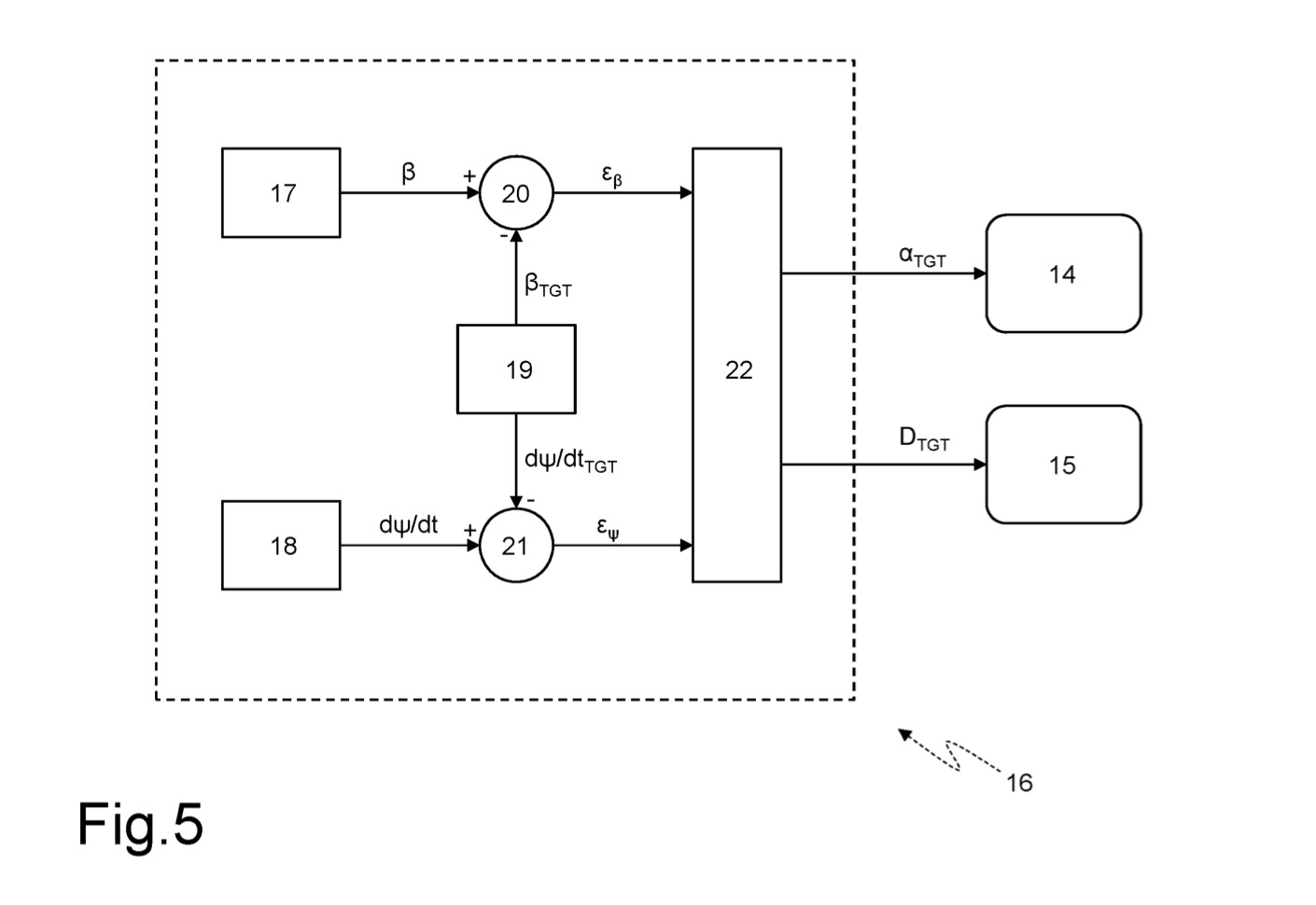 Pri nadgradnji tega sistema Ferrari predlaga uporabo krmilne enote in elektronskih aktuatorjev na vseh štirih kolesih. S tem bi prek aktuatorjev sproti prilagajali trdoto vzmeti in blažilnikov, drugi aktuatorji pa spreminjali kot zadnjih koles. Delovanje bi narekovali sprotni podatki senzorjev s ciljem zadrževanja vozila na začrtani (idealni) liniji. Tu Ferrari cilja predvsem na avtomobile s sprednjim motorjem.
Pri nadgradnji tega sistema Ferrari predlaga uporabo krmilne enote in elektronskih aktuatorjev na vseh štirih kolesih. S tem bi prek aktuatorjev sproti prilagajali trdoto vzmeti in blažilnikov, drugi aktuatorji pa spreminjali kot zadnjih koles. Delovanje bi narekovali sprotni podatki senzorjev s ciljem zadrževanja vozila na začrtani (idealni) liniji. Tu Ferrari cilja predvsem na avtomobile s sprednjim motorjem.
V patentni prošnji obrazložijo, da se količina popravkov razlikuje glede na hitrost vožnje. V srednje hitrih ovinkih z manjšimi bočnimi silami bo dovolj že krmiljenje zadnjih koles, posredovanje blažilnikov pa bi bil le sekundarni ukrep. Pri največjih obremenitvah, torej pri velikih hitrosti, pa bi sistem večji učinek dosegel z znižanjem težišča vozila s spremembo trdote vzmetenja ter ob tem potreboval le manjši zasuk zadnjih koles.