
Električni nadzor pesta za dodatno hitrost
05.01.2024
Ne zmogljivejši motor, pač pa inovativna zasnova zadnjega para pest je razlog, da je lamborghini huracan na znamenitih dirkališčih za nekaj sekund izboljšal odpeljane kroge.
Pri sodobnih avtomobilih je vse več komponent, ki aktivno prilagajajo lastnosti delovanja in posledično vplivajo na celotno vozilo. Izjema pri tem je pritrditev koles na osi, kjer so doslej inženirji prisegali na fiksno nastavitev geometrije koles. Lamborghini pa namerava to spremeniti z inovativnim pestom zadnjega kolesa, ki omogoča prilagajanje tako po navpični kot vzdolžni osi.
Naklon previsa (nagnjenost kolesa glede na navpičnico) in kot stekanja sta pri avtomobilih natančno določena in nespremenljiva. Proizvajalec nastavitve predvidi z namenom iskanja kompromisa med voznimi lastnostmi, učinkovitostjo in najmanjšo obrabo. Pri Lamborghiniju se s tem nočejo zadovoljiti, zato so razvili sistem Active Wheel Carrier (AWC), ki omogoča spreminjanje geometrije glede na trenutne razmere na cestišču.
Da bi pnevmatika nudila najboljši oprijem v vseh razmerah, mora biti pri vožnji naravnost kar se da pravokotna na podlago, medtem ko mora imeti v ovinkih, ko bočne sile povzročajo deformacijo, negativni naklon. Navznoter nagnjeno kolo ima čim večjo kontaktno površino z asfaltom.
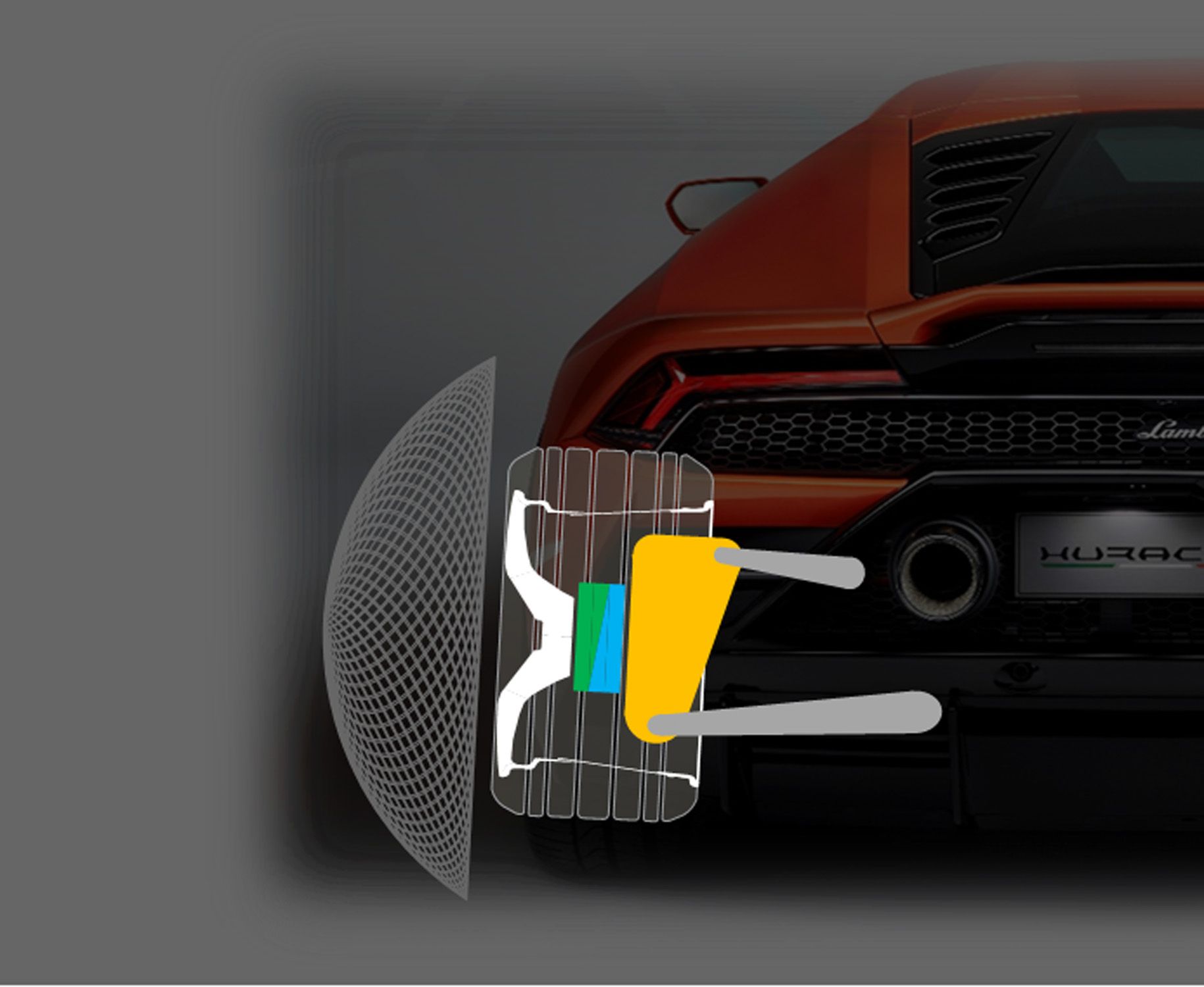
Lamborghini je to rešil z aktivnim pestom zadnjega kolesa, sestavljenim iz dveh valjev, ki z medsebojnim vrtenjem prilagajata stekanje od dveh do minus petih stopinj, navpični naklon pa do 6,6 stopinje.

Lamborghini tehnologijo preizkuša na modelu huracan Evo z zadnjim pogonom, pri čemer je sistem AWC nameščen le na zadnji kolesi. Za spremembe v geometriji skrbijo 48-voltni elektromotorji z lastno baterijo, najverjetneje pa bo v dobi električnih pogonov napajanje zagotavljal kar osrednji baterijski sklop.
Sistem so že preizkusili v praksi, kjer je avtomobil v primerjavi s serijskim na različnih stezah dosegel močno izboljšane čase. V Nardu je tako pridobil 2,5 sekunde na krog, 2,2 sekunde bolje je peljal v Imoli in pet sekund hitreje na Nurburgringu. Če bi bil sistem prilagojen za uporabo na vseh štirih kolesih in bi sodeloval z vsemi aktivnimi sistemi podvozja, bi se izboljšale tako zmogljivost in varnostne lastnosti avtomobilov, ampak tudi ekologija.
Optimalna geometrija bi prinesla počasnejšo in enakomernejšo obrabo pnevmatik, kar pa pomeni manj trdnih delcev, ki končajo v okolju, in obenem tudi daljšo življenjsko dobo pnevmatik.
